Танки и автоматы
Анатолий Шалыто,
ученый секретарь ФНПЦ ФГУП "НПО Аврора", профессор кафедры "Компьютерные технологии"
СПбГИТМО (ТУ)
mail@avrorasystems.com
Никита Туккель,
инженер-программист ФНПЦ ФГУП "НПО Аврора"
cynical@mail.ru
При создании объектно-ориентированных (ОО) программ [1, 2] в литературе все большее внимание уделяется их проектированию [3-5]. Мы рассмотрим технологию проектирования на основе минимального набора документов, описывающих как структурные, так и поведенческие стороны ОО программ. Эта технология, которую можно назвать объектно-ориентированным программированием с явным выделением состояний, предполагает совместное применение объектно-ориентированного и автоматного [6] подходов. Для иллюстрации методики воспользуемся примером разработки системы управления виртуальным танком для игры, которую предложила компания Alphaworks (robocode.alphaworks.ibm.com) в рамках коллективного учебного проекта Robocode.
Танки
Мы выбрали игру Robocode, поскольку в качестве языка программирования в ней использованы не специализированные средства, а один из широко распространенных объектно-ориентированных языков — Java. Отметим, что другая версия этой игры была предложена в качестве "разминки" для участников командного чемпионата мира по программированию ACM 2002 г.
Итак, в нашей игре действуют виртуальные роботы, обладающие средствами обнаружения и уничтожения противника. На рис. 1 приведен внешний вид среды исполнения в процессе боя двух танков.
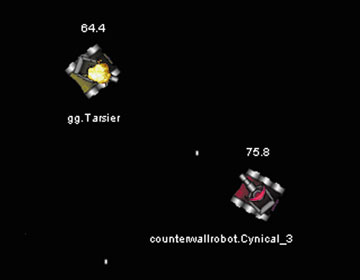 |
Рис. 1. Фрагмент боя.
|
История создания танка делится на два этапа. Сначала был разработан нестреляющий танк (counterwallrobot.Cynical_1), который осенью 2001 г. оказался лучшим на открытом турнире, проводимом организаторами сайта http://robocode.isbeautiful.org. Затем была разработана "стреляющая" версия (Cynical_2), которая стабильно занимала в мировом рейтинге 5-6-е места. Программная документация для следующей версии (Cynical_3), разработанная в соответствии с предлагаемой технологией, размещена на сайте http://is.ifmo.ru в разделе "Проекты". Сейчас работы по модернизации танка не ведутся, но он по-прежнему входит в десятку лучших танков мира.
Автоматы
При объектном проектировании для описания поведения объектов наряду с другими используется и автоматная модель [4,5]. В работе [7] была предложена основанная на процедурном подходе технология создания ПО для систем логического управления, названная SWITCH-технологией. В ней для спецификации программ использовались графы переходов автоматов. Сейчас существует вариант этой технологии, предназначенный для построения событийных систем и охватывающий все этапы создания ПО, включая сертификацию и документирование. Этот подход получил название "программирование с явным выделением состояний" [6].
Известны среды разработки, использующие автоматы при визуальном программировании (например, пакет Stateflow [8]). По сравнению с используемыми в этих средах методами предлагаемый нами подход обеспечивает большую универсальность, так как не зависит от применяемых инструментальных средств.
Хотя при использовании объектной парадигмы применяются автоматы [5], при этом не делается акцент на явном выделении состояний. Так, в работе [9] в качестве одного из признаков объектно-ориентированного языка названо "поддержание им объектов как абстракции данных с определенным интерфейсом поименованных операций и скрытым состоянием". Да и само определение объекта в этом смысле мало что проясняет: "Объект — это сущность, способная сохранять свое состояние (информацию) и обеспечивающая набор операций (поведение) для проверки и изменения этого состояния" [10]. Это определение не позволяет конструктивно использовать автоматы, так как при большом числе свойств (атрибутов) количество состояний объекта может быть огромным, что делает невозможным выделение состояний в явном виде. Более того, явное выделение состояний обычно не выполняется и при небольшом количестве атрибутов.
Предлагаемый подход
Перечисленные выше трудности устраняются при соблюдении пяти условий.
- Атрибуты объекта следует разделить на управляющие и остальные по аналогии
с организацией машины Тьюринга или машины фон Неймана [11]. - Управляющие (автоматные) состояния объекта, число которых обычно значительно
меньше числа остальных состояний (например, "вычислительных"), нужно выделить
явно. - При спецификации задачи следует рассматривать автоматные состояния в качестве
абстракций, переходя к соответствующим им переменным только на этапе реализации.
Это позволяет программисту отказаться от неупорядоченного введения "флагов"
при программировании. Программы с флагами, а не с явно выделенными состояниями,
неустойчивы, как слоны с тонкими ножками на одной из картин Сальвадора Дали.
Однако такие слоны, в отличие от программ с флагами, не встречаются повсеместно. - Необходимо ввести в этап реализации программ новый подэтап, называемый в
теории автоматов "кодирование состояний", и использовать многозначное кодирование
для каждого автомата с целью различия его состояний по значениям одной переменной,
обеспечив тем самым "наблюдаемость" программы. - Необходимо обеспечить протоколирование в терминах автоматов с целью проверки
корректности построенной программы, представляющей собой систему взаимосвязанных
объектов.
Применение нашего подхода, как и многих других, связано со множеством эвристик, возвратов назад, уточнений и параллельно выполняемых работ. При этом он может быть сформулирован как "идеальная" технология, расширяющая объектную и предусматривающая следующие этапы.
1. На основе анализа предметной области выделяются классы и строится
диаграмма классов, отражающая в основном наследование и агрегирование (например,
вложенность).
2. Для каждого класса разрабатывается словесное описание, хотя бы в
форме перечня решаемых задач.
3. Для каждого класса создается его структурная схема, напоминающая
карту CRC (Class-Responsibility-Collaboration, [12]). Нотация, используемая
при построении структурных схем классов, приведена на рис. 2.
 |
| Рис. 2. Нотация, используемая при построении структурных схем классов.
|
Интерфейс класса образуют открытые (public) и защищенные (protected) атрибуты и методы, к которым обращаются другие объекты. Эти методы, в свою очередь, вызывают закрытые (private) методы рассматриваемого класса. Закрытые методы можно разделить на две части — автоматные и остальные. Автоматные методы в общем случае делятся на три разновидности: реализующие автоматы; реализующие входные переменные; реализующие выходные воздействия.
4. При наличии в классе нескольких автоматов строится схема их взаимодействия
[6].
5. Для каждого класса составляются перечни событий, входных переменных
и выходных воздействий.
6. Для каждого автомата разрабатывается словесное описание.
7. Для каждого автомата с помощью правил, изложенных в [6], строится
схема связей, определяющая его интерфейс. В этой схеме в качестве событий (наряду
с другими) могут быть указаны сообщения, получаемые объектом и приведенные в
структурной схеме класса.
В отличие от структурной схемы класса, на входах и выходах в схеме связей автомата указываются не названия сообщений, а названия соответствующих входных и выходных воздействий.
8. Для каждого автомата на основе нотации, приведенной в [6], строится
граф переходов.
9. Каждый класс реализуется соответствующим модулем программы. Его структура
должна быть изоморфна структурной схеме класса, а методы, реализующие автоматы,
строятся по шаблону, приведенному в [6]. При этом методы, соответствующие входным
переменным и выходным воздействиям автомата, располагаются отдельно от метода,
реализующего автомат, из которого они только вызываются.
Благодаря такому подходу методы, соответствующие входным переменным и выходным воздействиям автомата, могут быть виртуальными (virtual) и переопределяться в порождаемых классах. Таким образом можно создать базовый класс для управления некоторой группой "устройств", в котором реализуются только автоматы, а используемые ими входные переменные и выходные воздействия переопределяются на уровне порождаемых классов, управляющих конкретными "устройствами".
10. Для изучения поведения программы (определяемого, в частности, взаимодействием
объектов), а в ходе разработки — и для ее отладки автоматически строятся
протоколы, описывающие работу всех автоматов в терминах состояний, переходов,
входных переменных и выходных воздействий с указанием соответствующих объектов.
Это обеспечивается путем включения функций протоколирования в соответствующие
методы. При необходимости могут протоколироваться и аналоговые параметры.
11. Выпускается созданная в ходе проекта документация.
Проектирование программы
Этапы процесса создания программы соответствуют предлагаемой технологии.
Первый разрабатываемый документ — это диаграмма классов, в верхней части которой расположены предоставляемые разработчику классы (в том числе из стандартной библиотеки) и среда исполнения (рис. 3).
 |
Рис. 3. Диаграмма классов.
|
Среда формирует определенные правилами игры события и вызывает их обработчики, объявленные в классе Robot. Эти обработчики наследует класс AdvancedRobot. Указанные классы реализуют методы, обеспечивающие непосредственное управление танком путем опроса и установки его параметров в среде исполнения.
По принятым правилам программа должна состоять из одного класса, порожденного классом Robot или AdvancedRobot. Название содержащего программу пакета counterwallrobot вместе с названием головного класса образует название танка. Головной класс "Супервизор" в рассматриваемой программе имеет имя Cynical и содержит шесть вложенных классов: "Стрелок", "Водитель", "Радар", "Список целей", "Цель" и "Вектор". Класс "Стрелок" — это система управления стрельбой, класс "Водитель" — система управления маневрированием, а класс "Радар" — система управления радаром. На диаграмме в классах, содержащих автоматы, указаны обозначения этих автоматов.
Рассмотрим проектирование классов на примере класса "Стрелок", содержащего два автомата А1 и А2. Этот класс предназначен для управления стрельбой и решает следующие задачи: выбор цели; анализ параметров цели и расчет упреждения; управление пушкой; определение скорости охлаждения пушки.
Структурная схема класса "Стрелок" приведена на рис. 4. Интерфейс его состоит из трех обработчиков событий и метода, возвращающего вызвавшему его объекту текущее положение пушки.
 |
| Рис. 4. Структурная схема класса "Стрелок".
|
Закрытая часть класса состоит из атрибутов и методов, реализующих автоматы А1, А2 и их входные переменные и выходные воздействия. В этой схеме указаны обозначения только тех закрытых методов, которые передают сообщения другим объектам.
На этапе 4, поскольку класс содержит более одного автомата, следует построить схему их взаимодействия (рис. 5), в данном случае весьма простую. Проектирование автоматов, входящих в класс, рассмотрим на примере автомата A1, участвующего в решении первых трех из указанных задач.
 |
| Рис. 5. Схема взаимодействия автоматов класса "Стрелок".
|
В этапах 5 и 6 (составление перечней событий, входных переменных и выходных воздействий, разработка словесного описания) в данном случае нет необходимости.
Схема связей автомата A1 приведена на рис. 6. Отметим, что в этой схеме — в отличие от структурной схемы класса — на линиях указываются не названия сообщений, а названия входных и выходных воздействий. Например, выходное воздействие z30, названное "Выбрать цель" (рис. 6), осуществляет выбор цели, передавая объекту класса "Список целей" сообщение "Вернуть ближайшую цель" (см. рис. 4).
 |
| Рис. 6. Схема связей автомата управления стрельбой.
|
Граф переходов автомата A1, построенный на этапе 8, приведен на рис. 7.
 |
| Рис. 7. Граф переходов автомата управления стрельбой.
|
Приведенный на сайте листинг 1 содержит фрагмент программы, реализующий рассматриваемый класс (показаны
только некоторые методы). Аналогично разрабатываются остальные классы, образующие
программу в целом.
Листинг 2 содержит фрагмент протокола функционирования разработанной системы управления для нескольких шагов боя нашего танка с одним противником. Отметим, что если в игре участвуют два "своих" танка, то можно запротоколировать весь бой, включая все попадания снарядами и гибель по крайней мере одного из них. Это позволяет полностью восстановить всю историю боя, а при необходимости понять причины принятия тех или иных решений.
Документация на программу в целом, разработанная на основе предлагаемого подхода
и включающая ее полный текст, приведена на сайте http://is.ifmo.ru
в разделе "Проекты". Отметим, что использование состояний, помимо прочего, уменьшает
вероятность того, что программа не успеет выполнить необходимые расчеты в отведенный
ей интервал времени. Так, например, из рис. 7 следует, что точный расчет упреждения,
занимающий значительное время, выполняется только в состояниях 2 и 3, в которых
автомат находится гораздо меньшее время, чем в остальных состояниях, в которых
расчет упреждения выполняется грубо.
Сравнение с UML
Предложенный подход, по мнению авторов, может служить альтернативой процессу проектирования [13], принятому при использовании UML, описание которого весьма громоздко [5]. Язык UML затруднительно применять при разработке систем со сложным поведением, так как в этом случае диаграммы последовательностей и взаимодействий практически невозможно построить вручную.
Мнение о сложности использования UML разделяют многие специалисты. Говоря о книге "трех друзей" ([13]), автор [2] пишет: "Когда вы в первый раз сталкиваетесь с языком UML, кажется, что его невозможно понять — такое там множество диаграмм и мелочей. Во втором издании книги [12] ее авторы утверждают, что большая часть всего этого попросту никому не нужна, и поэтому они отбрасывают малозначительные детали и говорят только о самом главном из имеющегося в языке".
Мы в настоящей работе пошли дальше, а именно:
- исключили диаграммы прецедентов, кооперации, последовательностей и действий,
что соответствует принципам построения "легких" методологий [14]; - для каждого класса ввели его структурную схему и нотацию для ее построения;
- для каждого класса, содержащего более одного автомата, ввели схему взаимодействия
автоматов; - для каждого автомата ввели схему связей;
- изменили нотацию диаграмм состояний, например, в части введения в их вершины
вложенных автоматов; - ввели шаблон для стандартной реализации каждого автомата;
- вместо построения сценариев при создании программы ввели исчерпывающее автоматическое
протоколирование, выполняемое в терминах автоматов при ее отладке и сертификации.
Такое протоколирование может быть полезно при построении черных ящиков, обеспечивая
при необходимости фиксацию всего поведения "танка" в период боя. Это особенно
важно в связи с тем, что главная проблема проектирования состоит не в том,
чтобы обеспечить безошибочность (этого достичь невозможно), а в том, чтобы
создать подходящие способы выяснения, "что именно пошло не так и как это исправить"
[14]; - предложили технологию создания программного обеспечения, которая представляет
собой вариант SWITCH-технологии, предназначенный для использования при объектном
проектировании.
Заключение
Описанный здесь подход — это продолжение работ авторов, направленных на широкое внедрение таких понятий, как "состояние" и "автомат", в инженерное программирование (Software Engineering). Он берет начало в теории автоматов и в проектировании систем управления. В этой статье изложена первая редакция предлагаемой концепции для рассматриваемого класса задач, в дальнейшем она будет усовершенствоваться. В частности, автоматы могут реализовываться не в виде методов класса, а отдельными классами. Кроме того, каждое состояние можно рассматривать как отдельный объект [15].
Подчеркнем, что объектно-ориентированное программирование с явным выделением состояний базируется на двух парадигмах — объектной и автоматной. При этом если "объектный подход предоставляет программисту средства для решения задачи в ее пространстве" [2], то автоматный подход — средства для описания поведения объектов в терминах пространства состояний. Применение автоматов проясняет поведение программы так же, как применение объектов проясняет ее структуру.
Авторы надеются, что предложенный подход внесет определенный вклад в инженерное программирование. В необходимости такого программирования, по словам Г. Буча, "многие сомневаются", а "Б. Гейтс публично заявляет, что не верит в диаграммы и не желает, чтобы его программисты занимались проектированием" [14]. И это при наличии в выпускаемом Microsoft и другими разработчиками программном обеспечении огромного числа ошибок, которые в системах, управляющих ответственными объектами, недопустимы вовсе. Однако в последнее время формальные методы (например, на основе абстрактных машин состояний при построении спецификаций [16]) начинают использоваться и в Microsoft.
Подход, основанный на применении автоматов в программировании, был использован авторами и в других проектах. Некоторые из них описаны на сайте http://is.ifmo.ru в разделе "Проекты". Кроме того, предлагаемая технология с 1991 г. применяется при создании систем управления технологическими процессами, в том числе и на программируемых логических контроллерах [7].
Данная работа была выполнена на кафедре "Компьютерные технологии" Санкт-Петербургского
государственного института точной механики и оптики (технического университета)
при поддержке Российского фонда фундаментальных исследований по гранту № 02-07-90114
"Разработка технологии автоматного программирования".
Литература1. Страуструп Б. Язык программирования Си++. М.: Бином, СПб.: Невский 2. Эккель Б. Философия Java. СПб.: Питер, 2001. 3. Буч Г. Объектно-ориентированный анализ и проектирование с примерами 4. Терехов А. Н., Романовский К. Ю., Кознов Д. В. и др. REAL: Методология 5. Буч Г., Рамбо Д., Джекобсон А. UML. Специальный справочник. СПб.: 6. Шалыто А. А., Туккель Н. И. Программирование с явным выделением состояний 7. Шалыто А. А. SWITCH-технология. Алгоритмизация и программирование 8. Дьяконов В. Simulink 4. Специальный справочник. СПб.: Питер, 2002. 9. Фридман А. Л. Основы объектно-ориентированной разработки программных 10. Jacobson I. et al. Object-Oriented Software Engineering. NJ: Addison 11. Шалыто А. А., Туккель Н. И. От тьюрингова программирования к автоматному 12. Фауллер М., Скотт К. UML в кратком изложении. Применение стандартного 13. Booch G., Rumbaugh J., Jacobson I. The Unified Software Development 14. Программы следующего десятилетия //Открытые системы. 2001. № 12. 15. Гамма Э., Хелм Р., Джонсон Р. и др. Приемы объектно-ориентированного 16. Gyrevich Y. et al. Using Abstract State Machines at Microsoft: A |